总机 : 0574-8628-3050
销售 : 0574-8666-2730
0574-8666-2960
0574-8666-2930
158-6954-3007(李先生)
传真 : 0574-8628-3350
邮箱 : bh@prcem.com (综合)
sales@prcem com (销售)
hr@prcem.com(人力)
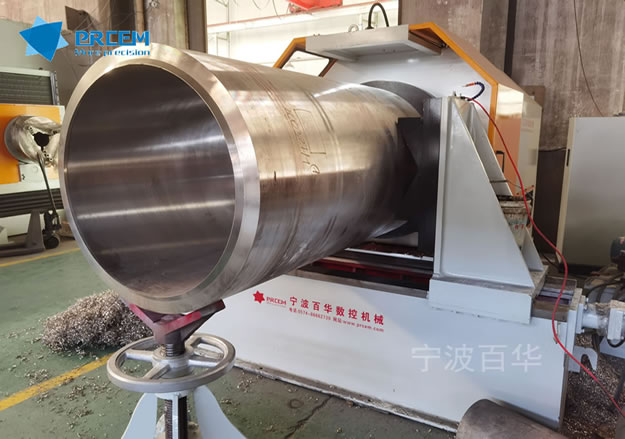
焊接机器人机构一般可以视为一种杆件机构,包含手臂、手腕、手爪和行走机构等部分。对于焊接机器人而言,其本体结构主要包含手臂和手腕两部分。
对于自由刚体,其在三维空间中有6个自由度。焊接机器人要完成任一空间作业,也需要6个自由度才能实现。焊接机器人运动时是由手臂和手腕的运动组合而成的,,通常手臂部分有3个关节,用以改变手腕参考点的位置,称为定位机构;手腕部分也由3个关节,通常这3个关节轴线相交,用来改变末端工具的姿态,称为定向机构。所以,整个焊接机器人可以看成是定位机构连接定向机构。
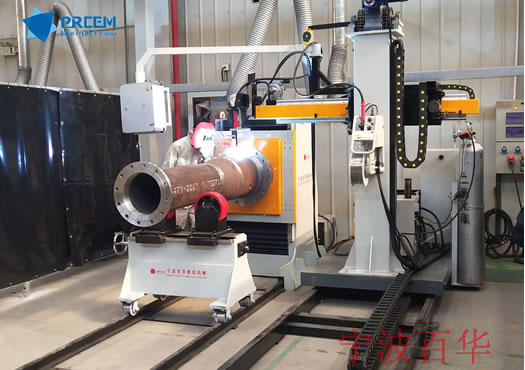
其焊接机器人的手臂是直接进行作业的部分,其结构在很大程度上将影响机器人的能力。一般来说,手臂由杆件和连接他们的关节(运动副)构成。一个关节有一个或几个自由度。所谓自由度,是表示机器人运动灵活性的指标,意味着独立的单独运动的个数,由驱动器能产生主动动作的自由度称为主动自由度,不能产生驱动力的自由度称为被动自由度。

 联系我们
联系我们宁波百华数控机械有限公司
总机:0574-86283050 传真:0574-86283350
销售:0574-86662730 邮箱:bh@prcem.com (综合)
0574-86662960 sales@prcem com (销售)
0574-86662930 hr@prcem.com (人力)
158-6954-3007(李先生)



 当前位置:
当前位置: